
Posts Tagged ‘grasping’
AUTOLAB creates most dexterous robot yet

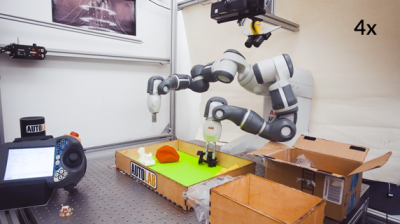
Prof. Ken Goldberg, PhD student Jeffrey Mahler, and researchers at the Laboratory for Automation Science and Engineering (AUTOLAB) have just created the most dexterous robot in existence. Version 4.0 of the Dex-Net robot (more about 3.0 here) uses a 3D sensor and has two arms to grasp with, one with a gripper and the other with…
Read MoreKen Goldberg’s AUTOLAB Takes Robot Grasping To A New Level
New research by Professor Ken Goldberg, Jeff Mahler, and the Laboratory for Automation Science and Engineering (AUTOLAB) shows real progress on the problem of robots grasping everyday objects. DexNet 2.0 used deep learning with a cloud database of thousands of 3D objects to collect 6.7 million data points in order to train a robot to pick up and move objects in the…
Read More