
Posts Tagged ‘autolab’
AUTOLAB research featured in New York Times

The UC Berkeley Laboratory for Automation Science and Engineering (AUTOLAB) was featured in the New York Times today for its research on robotic grasping. The article featured AUTOLAB’s Dex-Net robot which can pick up and sort objects that it has never encountered before using machine learning and neural network algorithms. “What you really want is…
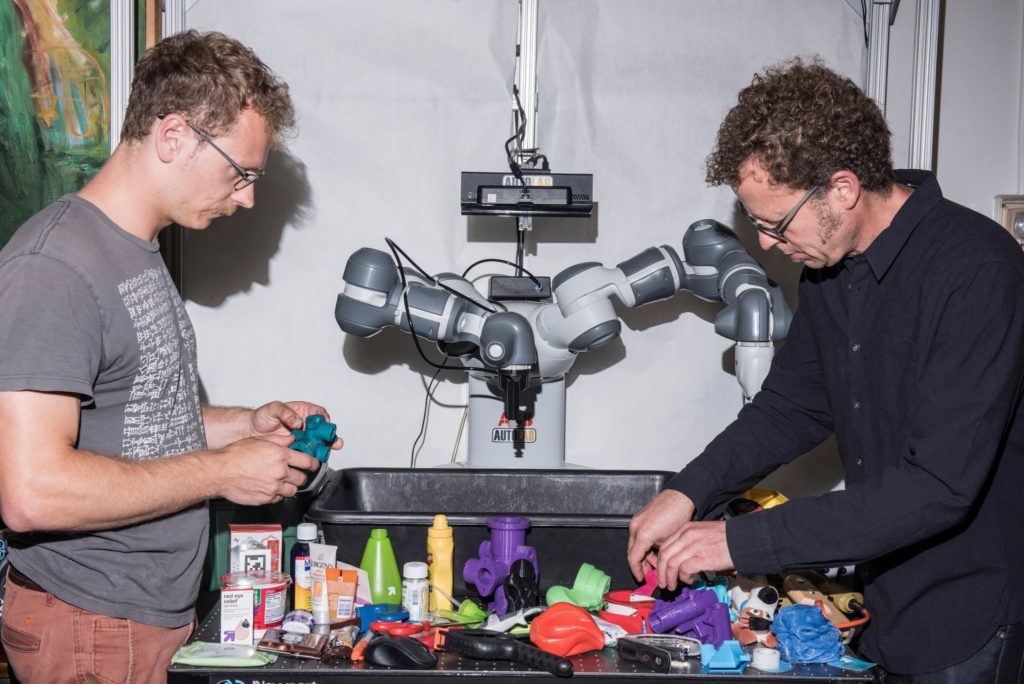
Read MoreAUTOLAB creates most dexterous robot yet

Prof. Ken Goldberg, PhD student Jeffrey Mahler, and researchers at the Laboratory for Automation Science and Engineering (AUTOLAB) have just created the most dexterous robot in existence. Version 4.0 of the Dex-Net robot (more about 3.0 here) uses a 3D sensor and has two arms to grasp with, one with a gripper and the other with…
Read MoreHow Flight Simulation Tech Could Help Turn Robots Into Surgeons
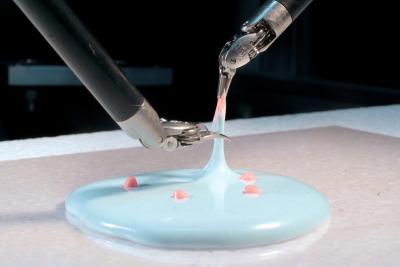
While the use of robots in surgery has come a long way with the advent of the da Vinci Surgical System. However, current technology still requires a human mind to operate successfully. The most difficult aspect of building a self sustaining surgical robot is creating a robot with the ability to respond to its changing environment.…
Read MoreNew York Times showcases AUTOLAB research on robot grasping
Today, the New York Times featured research being conducted at the UC Berkeley Laboratory for Automation Science and Engineering (AUTOLAB) led by IEOR Professor Ken Goldberg. AUTOLAB is breaking new ground in the area of robot grasping by helping robots teach themselves to reliably grasp irregularly-shaped objects that they have never encountered before. The robot uses a neural network to analyze a…
Read MoreKen Goldberg And Pieter Abbeel Awarded $1.3M NSF National Robotics Initiative Award

IEOR professors Ken Goldberg and Pieter Abbeel, and UC Berkeley professors Anca Dragan and Stuart Russell, have been awarded the NSF National Robotics Initiative Award for their research in scalable collaborative human-robot learning. Their project will be funded at $1,374,893 over the course of three years for research in scalable robot manipulation through human immitation. The…
Read MoreKen Goldberg’s AUTOLAB Takes Robot Grasping To A New Level
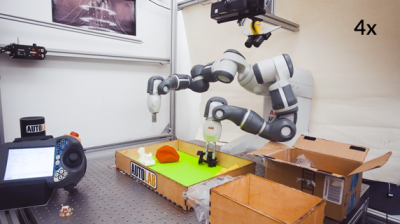
New research by Professor Ken Goldberg, Jeff Mahler, and the Laboratory for Automation Science and Engineering (AUTOLAB) shows real progress on the problem of robots grasping everyday objects. DexNet 2.0 used deep learning with a cloud database of thousands of 3D objects to collect 6.7 million data points in order to train a robot to pick up and move objects in the…
Read MoreFast Company features Ken Goldberg’s research on robot grasping
Collaborative Assessment and Feedback Engine Eugene Pang September 5, 2017 While machines continue to reduce much of the drudgery that humans endure, there are still some problems which remain extremely difficult for roboticists and other engineers to solve. Why is it that some technologies such as virtual reality and self-driving cars are becoming a reality, but we still do not have anything…
Read MoreKen Goldberg and Berkeley Automation Sciences Lab to Present at ICRA

The Berkeley Laboratory for Automation Science and Engineering directed by IEOR Professor Ken Goldberg will be presenting seven papers at the 2016 IEEE International Conference on Robotics and Automation happening next week in Stockholm, Sweden. Ken will also be delivering a keynote titled “Deep Grasping: Can large datasets and reinforcement learning bridge the dexterity gap?” Titles and authors for the papers being presented…
Read More