
New York Times showcases AUTOLAB research on robot grasping
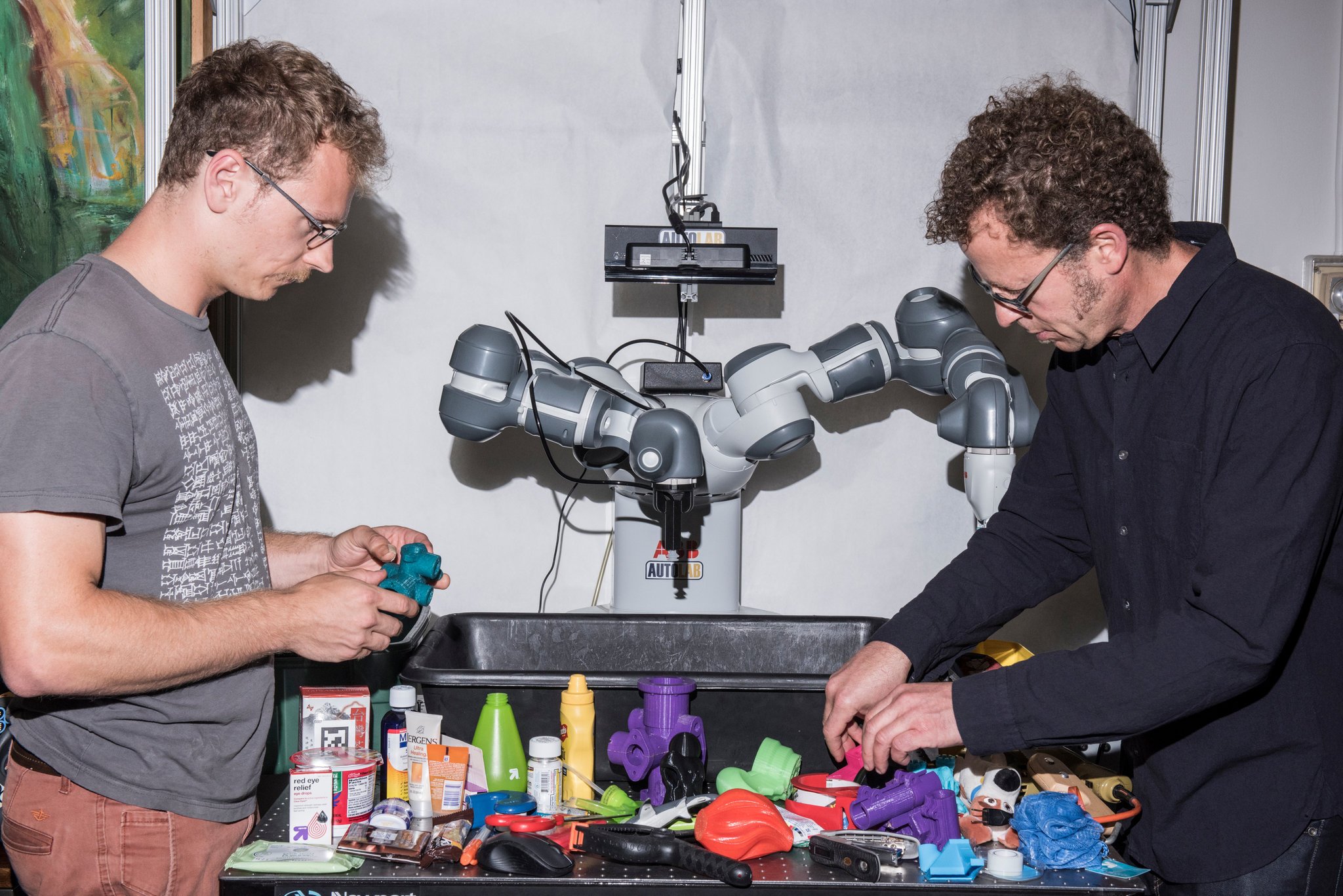
Today, the New York Times featured research being conducted at the UC Berkeley Laboratory for Automation Science and Engineering (AUTOLAB) led by IEOR Professor Ken Goldberg. AUTOLAB is breaking new ground in the area of robot grasping by helping robots teach themselves to reliably grasp irregularly-shaped objects that they have never encountered before. The robot uses a neural network to analyze a cloud database of seven million 3D objects in order to teach itself the best way to pick up new objects automatically. Companies like Amazon and Siemens are interested in robots that can grasp and place irregularly-shaped objects, as it could transform today’s manufacturing processes and supply chain.
The research is the work of Jeffrey Mahler, Jacky Liang, Sherdil Niyaz, Michael Laskey, Richard Doan, Xinyu Liu, Juan Aparicio Ojea, and Ken Goldberg with support from the AUTOLAB team. The team will submit a paper on the research to the Institute of Electrical and Electronics Engineers International Conference on Robotics and Automation (IEEE ICRA) this Friday.
The research was previously featured in the MIT Technology Review.
UC Berkeley’s AUTOLAB, directed by Professor Ken Goldberg, is a world-renowed center for research in robotics and automation sciences, with 30+ postdocs, PhD and undergraduate students pursuing projects in Cloud Robotics, Deep Reinforcement Learning, Learning from Demonstrations, Computer Assisted Surgery, Automated Manufacturing, and New Media Artforms. Sponsors Include: NSF, USDA, DARPA, Google, Siemens, Intuitive Surgical, Autodesk, Samsung, Cisco, IBM, and CloudMinds. AUTOLAB Research Papers: http://goldberg.berkeley.edu/p
